Humanoïde robotte wat leer om voorwerpe te hanteer
Menslike robotte sukkel met nuwe take.’n Nuwe benadering kan hulle help om voorwerpe betroubaar in huise, fabrieke en diensinstellings te hanteer.
Menslike robotte wat leer om voorwerpe te hanteerHumanoïde robotte kan baie take wat deur mense gedoen word, hanteer.Hierdie take sluit in huishoudelike take soos skoonmaak, organisering en kook, sowel as die verskuiwing van items of die samestelling van produkte.Om hierdie take op hul eie uit te voer, moet menslike robotte voorwerpe in verskillende situasies manipuleer.Die meeste huidige masjienleermodelle vir robotmanipulasie werk goed in omgewings soortgelyk aan hul opleiding, maar sukkel in nuwe situasies.
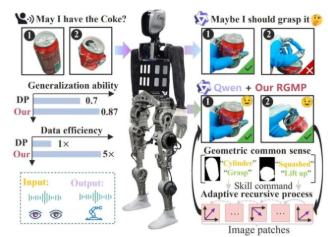
Navorsers aan die Wuhan Universiteit het RGMP (herhalende geometriese voorafgaande multimodale beleid) geskep, 'n raamwerk om menslike robotte se objekmanipulasie te verbeter.RGMP kan robotte help om meer voorwerpe te gryp en meer take betroubaar te voltooi.
Die masjienleerraamwerk kombineer geometriese semantiese redenering met visuo-motoriese beheer vir menslike robotte.Die raamwerk het ten doel om robotaanpasbaarheid te verbeter, wat betroubare objekmanipulasie oor instellings moontlik maak, selfs wanneer dit op klein datastelle opgelei word, terwyl konteksinligting gebruik word.
Die raamwerk het twee hoofkomponente: 'n meetkundige voorafgaande vaardigheidselektor (GSS) en 'n adaptiewe rekursiewe Gaussiese netwerk (ARGN).Die GSS integreer meetkundige prioriteite in 'n visietaalmodel om die robot te help om vaardighede te kies gebaseer op voorwerpvorm en -posisie.Die ARGN ondersteun bewegingsintese deur ruimtelike verhoudings tussen die robot en voorwerpe waarmee dit in wisselwerking is, rekursief te modelleer.Saam maak hierdie komponente taakuitvoering met minimale data moontlik, wat uitdagings aanspreek met yl opleidingsdemonstrasies.
Die raamwerk is getoets op 'n mensagtige robot en 'n dubbelarm lessenaarrobot in eksperimente.Resultate het getoon dat die robotte verskillende voorwerpe in die meeste scenario's kon manipuleer.Die raamwerk het veralgemening getoon, hoë sukseskoerse behaal en verbeterde datadoeltreffendheid in vergelyking met moderne modelle.
Hierdie benadering kan outomatisering ondersteun in take waar robotte moet aanpas by nuwe omgewings sonder bykomende opleiding.Potensiële toepassings sluit in huishoudelike take, dienslewering en handmatige vervaardigingsprosesse.Toekomstige werk sal fokus op die verbetering van veralgemening oor take en om robotte in staat te stel om aksietrajekte vir nuwe voorwerpe af te lei met minimale menslike insette, wat die behoefte aan onderrig in dinamiese omgewings verminder.