Sagte robotte wat sonder rekenaars werk
Robotte wat voorwerpe sonder elektronika beweeg, oplig en voel, is nou moontlik.Hulle werk met behulp van materiale wat op voorspelbare maniere snap en buig.
Sagte robotte vertrou gewoonlik op rekenaars, sensors en batterye, wat die gebruik daarvan beperk in uiterste of moeilik bereikbare omgewings soos ruimte, diep onderwater of kernplekke.Navorsers aan die Purdue -universiteit pak hierdie probleem aan deur robotte te ontwerp wat geheel en al deur fisiese gedrag werk, sonder elektronika.
Die benadering gebruik bistabiliteit, 'n eienskap waar 'n struktuur in twee stabiele posisies kan rus.Hierdie verskynsel is algemeen van aard-byvoorbeeld opvoubare vlerke van oorpakke en die blaar-sluitmeganisme van Venus-vliegtrap.Ingenieurs gebruik bistabiliteit om programmeerbare strukture te skep wat energie kan stoor, werk kan uitvoer en selfs as meganiese rekenaars kan optree.
Een sleutelmateriaal is die Fidget Popper, 'n metamateriaalkoepel wat tussen twee toestande snoei.Deur veelvuldige koepels te kombineer, kan navorsers die vorm en beweging van sagte robotte presies beheer.Die koepels is gemaak van 3D-gedrukte termoplastiese poliuretaan, en metastabiliteit laat tydelike toestande toe, wat robotte in staat stel om tydafhanklike reaksies te hê.
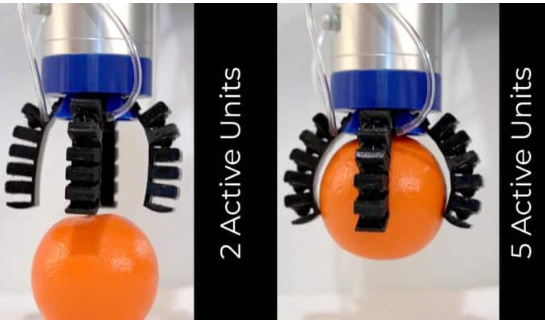
Twee soorte robotte demonstreer hierdie beginsels: 'n Gripper en 'n wandelaar.Die Gripper gebruik bistbare koepels om voorwerpe van verskillende groottes en gewigte sonder 'n rekenaar te ervaar en op te lig.Dit betrek bykomende koepels slegs as 'n voorwerp te swaar is en voorwerpe vrystel, aangesien metastabiele koepels na hul oorspronklike toestand terugkeer.Die Walker beweeg vorentoe of draai deur die opeenvolging van koepels wat op verskillende hoeke gerangskik is, heeltemal deur hul fisiese ontwerp.
Hierdie robotte is ook robuust.Selfs wanneer die koepels van die gripper beskadig word, bly die arms steeds funksioneer as gevolg van die inherente eienskappe van bistabele strukture.
Deur die bistabiliteit te benut, beoog navorsers om robotte te skep wat kan werk in omgewings wat te ekstreme of ontoeganklik is vir konvensionele robotte, wat oplossings bied vir toepassings in ruimte, kernreaktors of diep onderwaterbedrywighede.